The Pisa/IIT SoftHand is a simple, robust and effective hand designed for grasping and soft manipulation
Simple because only one motor actuates the whole hand;
Robust because innovative, biomorphic joint design allows perfect recoversing after large deformations and even disarticulation;
Effective thanks to the soft-synergy idea applied to 19 degrees of freedom.
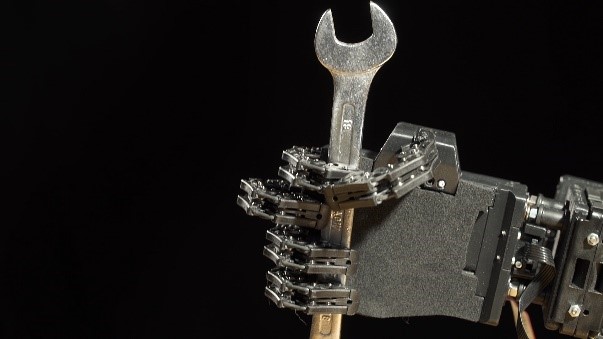
The idea at the core of the Pisa/IIT SoftHand, i.e. soft synergies, comes from the combination of natural motor control principles. As a result the hand pose is not predetermined, but depends on the physical interaction of its body with the environment, allowing to grasp a geat variety of objects despite its single degree of actuation.
Simplicity, robustness, lightness and effectiveness make the Pisa/IIT SoftHand ideal for both humanoid robotics and prosthetics.
